


Първо, нека разберем разликата между октокоптера и квадрокоптера. В допълнение към името това е и броят на двигателите на релсите. Т.е. квадрокоптер - четири двигателя, октокоптер - осем. Това важи и за хексакоптера - шест, трикоптера - три и т.н. Ако има четири (X) водача например и осем двигателя, тогава това все още е октокоптер, но е обозначен като X8. Т.е. на четири релса, осем двигателя.
По принцип числата с префикс за коптери са самолети, които се управляват от радиосигнала на оператора от земята. Студент от Индия реши да отиде по-далеч и да направи октокоптер, способен да издигне човек във въздуха. Това не е евтин проект. Финансирането бе поето от образователната институция.
Инструменти и материали:
- Двигатели Turnigy CA170 Motors - 8 бр;
- Контролер Turnigy Fatboy 300A - 4 бр;
- Turnigy 200A HV контролер - 4 бр;
- Предавател Hitech XG11 Tx / Rx;
-Полетен DJI A3 Pro контролер;
-Контролер DJI Naza M V2;
- Батерия Zippy 22.2V 5Ah 40C LiPo - 16 бр;
- зарядно устройство 6s LiPo Charger;
-XT150 конектори - 50 бр .;
-Wire 8AWG Sillicone Wire - 10 метра;
-Servoprivody;
-Бол за игра на скуош (Squash Balls) - 4 бр;
- МДФ лист 25см х 50см х 2мм;
-Drel;
- Ъглошлайф;
- Отвертки;
- Ключове;
- Клещи;
-Лазерна резачка или лентов трион;
-Асортимент на гайки 4 мм, 6 мм и 8 мм, болтове и шайби;
-Gorelka;
-LED LED;
-Паялни аксесоари;
- 2 и 3 мм стоманена тел;
-Винт Telrep 100mm-200mm - 40 бр .;
- 40 куки и очни болта;
-Обороти на оборота на тахометър;
-Мощен анализатор (Turnigy Wattmeter / Ampmeter);
-Контролер на батерията;
- тръби от алуминиев профил;
-Алуминиева плоча;
- Двустранна лента;
-Заваръчна машина;
-Ruletka;
-Компютър с Fusion 360;
- Батерия 11,1 V 2200 mAh LiPo 30C;
-Гъста тъкан 1.2m x 1.2m;
- Силна нишка и игла;
-Безопасност;
Първа стъпка: Дизайн
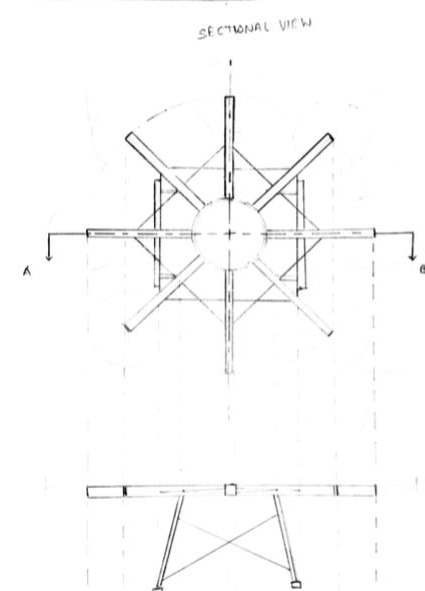
Когато разработва пилотиран октокоптер, капитанът обмисля различни опции за конфигурация и X8 и H, и T, но стига до извода, че най-оптималният, поради различни причини, би бил дизайнът на октокоптера, според традиционната схема.
Тогава беше необходимо да разберете какъв трябва да е размерът на октокоптера. Изчисленията бяха направени с помощта на CAD модели на Fusion 360. Съществуващите винтове бяха взети предвид при изчисленията. Оптималният се оказа диаметър три метра, височина един метър. Вътрешна кошница, за човек 55x55 cm.

Стъпка втора: Количка за пазаруване
Рамката е заварена от алуминиев квадратен профил с рафт 50 мм и дебелина на стената 2 мм.
Профилът беше нарязан и заварен. Шевовете се почистват.



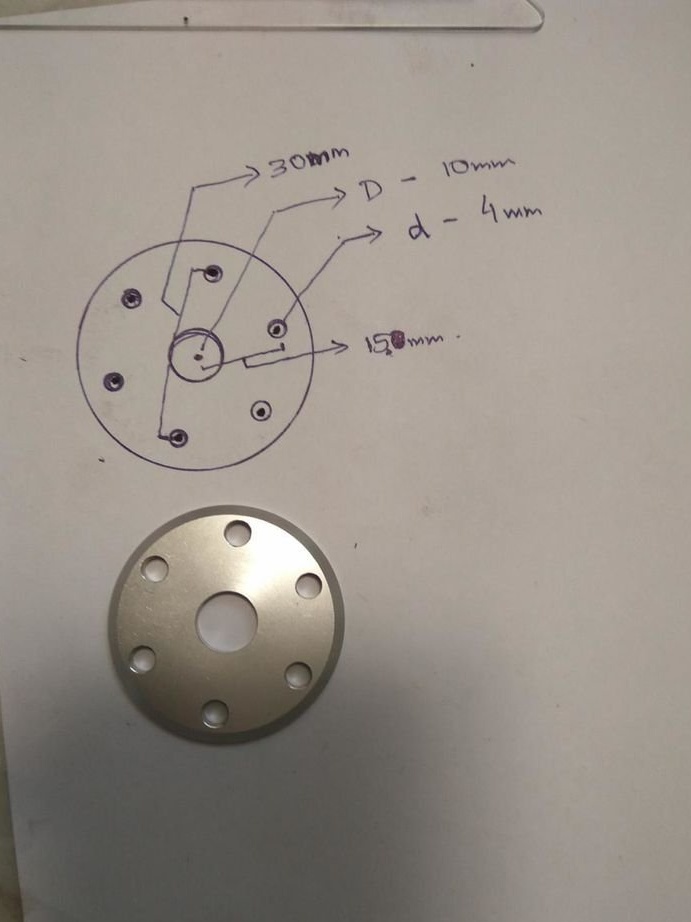
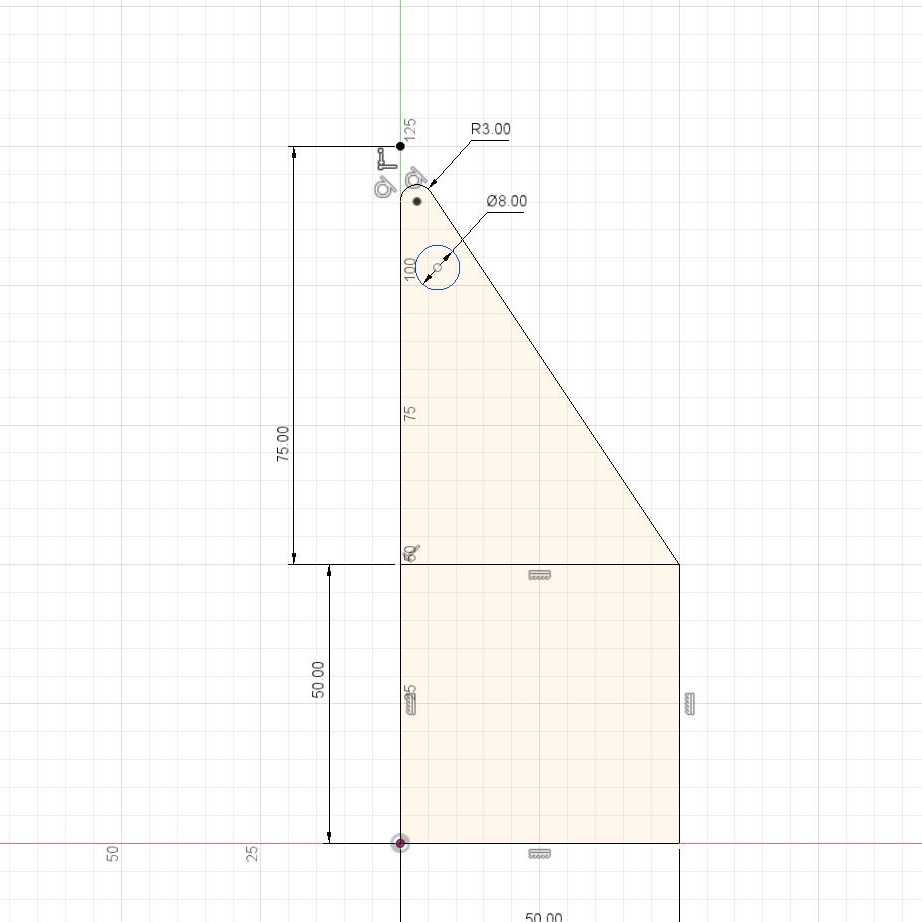
Трета стъпка: монтаж на плочи
За скобите майсторът използва алуминиеви плочи от 1,5 мм. Общо има осем скоби, четири в ъглите и четири в средата на рамката. Дължината на рамото на рамото и носещата част е 15 см. Конзолите са проектирани в Fusion 360. Плочите са нарязани с фреза. В тях са пробити отвори за монтаж. След това скобите бяха заварени към рамката.






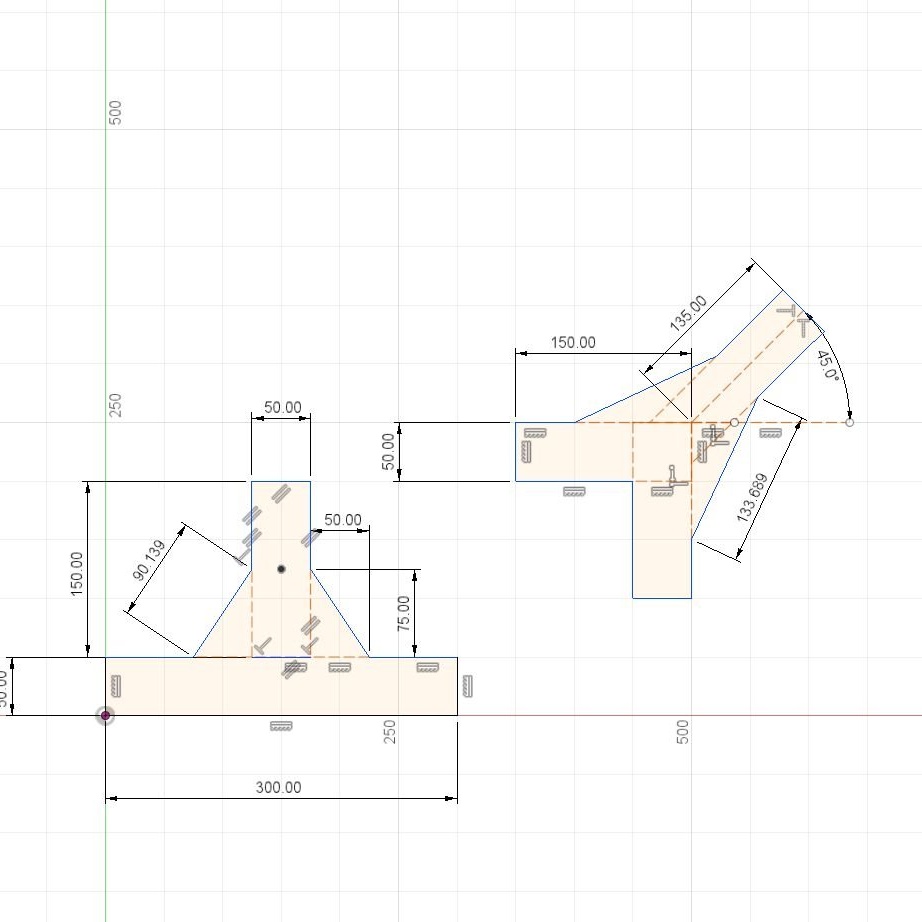
Четвърта стъпка: Профил на превозвача
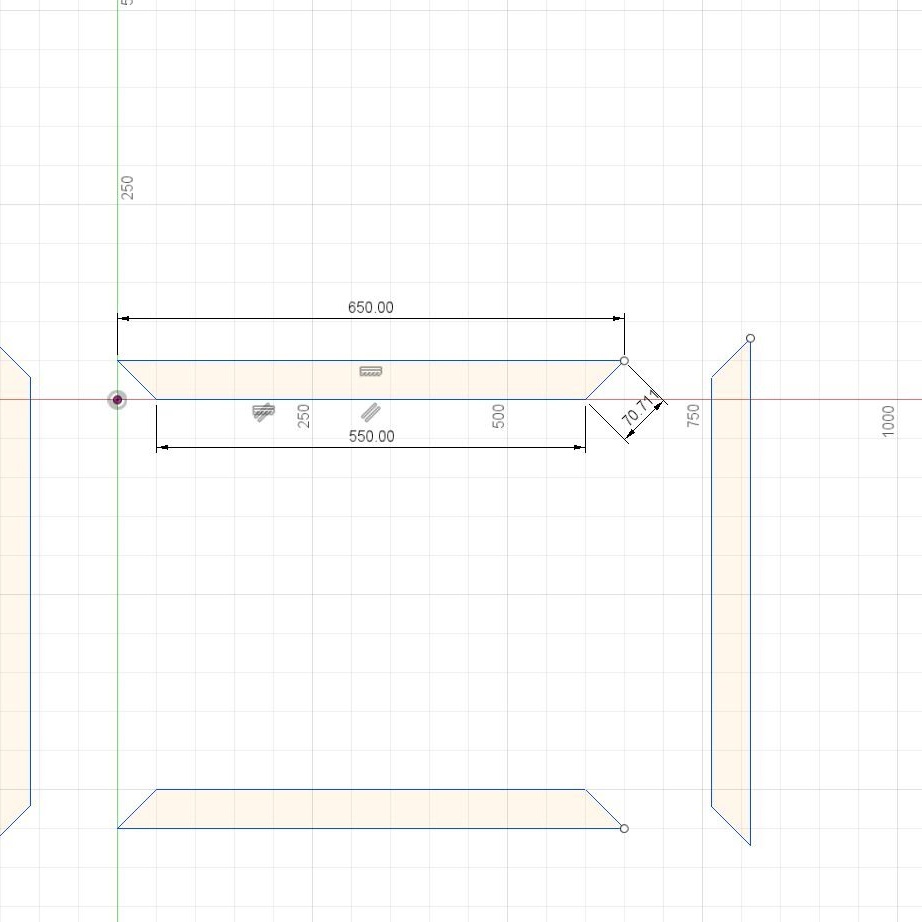
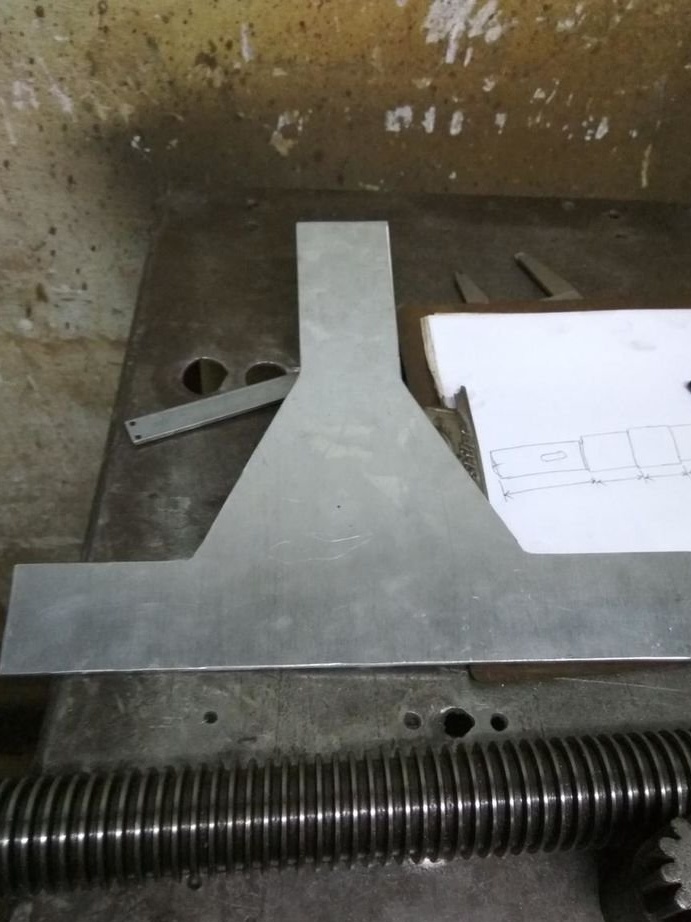
Тези профили са прикрепени към скобите, а в краищата им са инсталирани двигатели. Профилите са квадратни, 50 X 50 см и имат различна дължина. В ъглите са прикрепени профили с дължина 112,5 см. Отстрани е прикрепен профил от 125 см. Изрезът се прави под ъглови профили под ъгъл 45 градуса. Необходимо е крайната му страна да е съседна на равнината на ъгъла.
За да фиксира профилите към скобите, майсторът пробива дупки за болтовете.




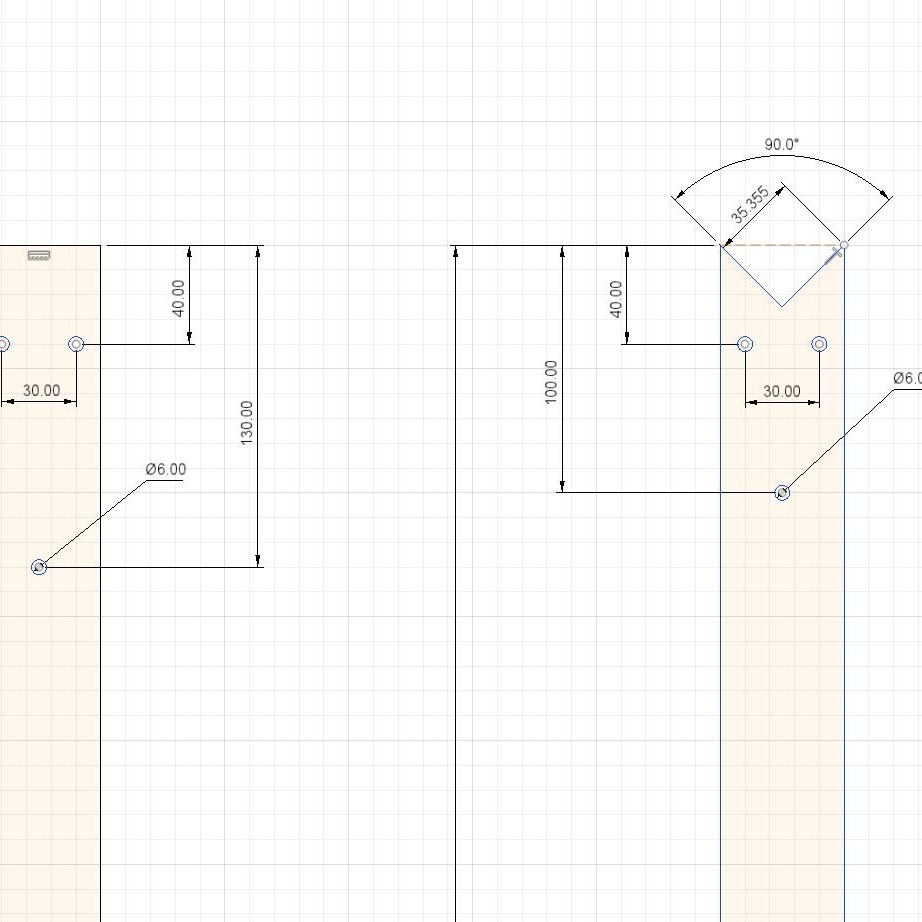
Стъпка пета: Монтаж на двигателя
Двигателите се завинтват върху алуминиева квадратна плоча. От дъното на плочата, успоредни един на друг, се завинтват два ъгъла. Разстоянието между тях е равно на ширината на профила. По-нататък плочата с двигателя е монтирана върху профила, монтажните отвори са пробити и всичко е усукано с болтове.





Стъпка шеста: Шаси
Шасито е изработено от алуминиеви профили 25 х 25 мм и дебелина 3 мм. Всички части бяха заварени, а размерите им могат да се видят на снимката. Идеята беше да монтирате шасито от коша под ъгъл от 30 градуса. За да се предотврати повреда на шасито, между тях се изтеглят опорни кабели.


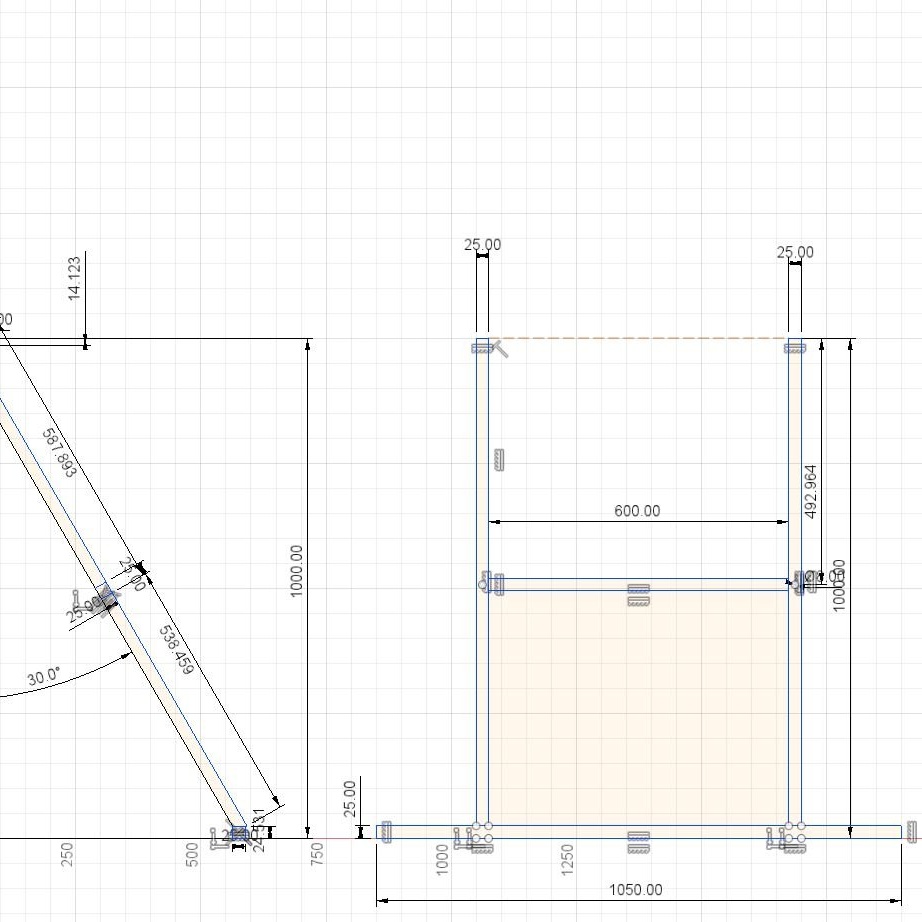
Стъпка седма: Поддържащи профили за поддръжка
След монтирането на двигателите носещите профили започнаха да се огъват. Тогава майсторът се опита да стартира двигателя и разбра, че профилите "вървят". Необходимо беше да се укрепи дизайна.
Добавянето на плочи би добавило твърде голямо тегло на конструкцията. Тогава майсторът реши да направи V-образен дизайн от коша надолу. В долната му част са прикрепени въжета. Останалите краища на кабелите са прикрепени към скобите в средата на носещите профили. Кабелите се изтеглят с подемник. Така структурата става твърда.















Стъпка осма: Свържете се
Първо, главният продавач на конекторите до краищата на проводниците.


След това започва инсталацията. Всеки двигател трябваше да бъде проверен за посоката на въртене. Ако е необходимо, е лесно да промените посоката на въртене на двигателя и, съответно, винта, като смените два от трите проводника, идващи от ESC към двигателя. След като всички двигатели са били свързани правилно, съветникът направи инсталацията съгласно схемата на свързване от производителя.
Контролерите на полета IMU DJI A3 са много чувствителни към смущения от метали и капитанът не успя да конфигурира системата поради смущения. В резултат на това капитанът замени A3 с Naza M V2, който имаше подобна схема на свързване. Naza M V2 работи много надеждно.
Тогава съветникът свързва батериите. На всеки профил на носача се свързват последователно две 22.2 V батерии.



Стъпка девета: Пилотно място
Седалката беше шита от здрава материя. Също така към пилота е прикрепен предпазен колан, който е прикрепен към рамката, и каска.






Стъпка десета: Първи полет
Преди пилотния полет на октокоптера бяха проведени няколко теста с торба с пясък и след това с модел на човек. По време на полета бяха симулирани различни ситуации от загуба на контрол до порив на вятъра.
След всички тестове пилотът най-накрая излетя във въздуха.






Преди да летите, трябва да извършите следните действия.
Проверете херметичността на болтове, кабели, монтаж на двигателя.
Проверете окабеляването.
Проверете дали винтовете се въртят лесно.
Уверете се, че всички ESC са изключени.
Уверете се, че всички батерии са сигурно свързани и заредени.
Свържете захранването към полетния контролер за инициализация и калибриране.
След свързване към GPS, той ще премине в напълно автоматичен режим (Alt. + Att. Hold).
Седнете на пилотското място и закопчайте.
Свържете всички батерии към ESC.
Свържете двете батерии последователно (ESC-RB-RB-ESC) с помощта на резистор, за да премахнете искрата.
Включете двигателите, като завъртите превключвателя в положение за включване.
Използвайте контролера за управление на октокоптера.