

такъв роботът вече е създаден и се нарича DIY: LightBot. Освен това всеки може да го събере, всички елементи за създаване могат лесно да бъдат намерени, а роботът ще бъде сглобен доста просто. Този тип робот постоянно ще върви след собственика на тъмно и ще го подчертава на правилното място, което елиминира необходимостта да държите фенерчето в ръка. Роботът ще бъде наблюдаван от собственика благодарение на инфрачервен сензор, който е прикрепен към крака на собственика.
Материали и инструменти за създаване на робот:
1. Инфрачервен маяк. Такова устройство ще се състои от четири инфрачервени светодиода, те могат да бъдат намерени в дистанционното управление от телевизора.
2. Две колела от комплект K'nex или детски играчки.
3. Два малки мотора (могат да се намерят в детските играчки).
4. Два инфрачервени транзистора като NPN или фоторезистор. Инфрачервените фототранзистори не са трудни за закупуване.
5. Три батерии тип АА и една 9 волта.
6. PVC тръба.
7. Термо лепило.
8. Пластмасова вилица за еднократна употреба.
Производственият процес на робота:
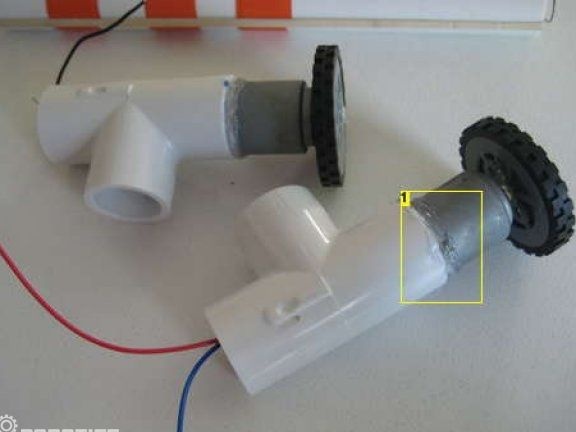
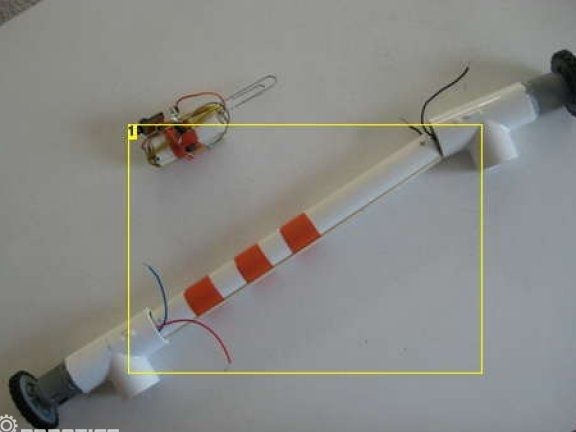
Първа стъпка. Монтаж на двигателя
Първо трябва да инсталирате двигателите. За тяхното инсталиране се използват пластмасови „тройници“, които след това се поставят върху основната тръба. Двигателите се закрепват с горещо лепило. Тук не е необходимо да съжалявате за лепилото. На този етап колелата могат да бъдат поставени на оста на двигателите. Така че да се държат здраво, те могат да бъдат фиксирани и с лепило с разтопяване.
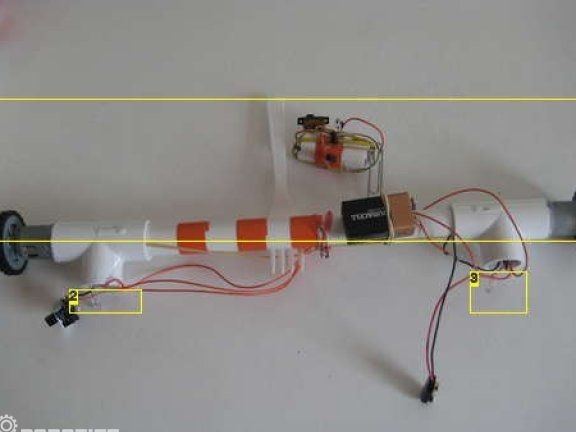
Стъпка втора Инсталиране на фоторезистори
Фоторезисторите са необходими, за да се проследи инфрачервеният маяк. Те ще бъдат един вид робот очи. В зависимост от посоката, в която ще излезе светлината, роботът ще ускори един от двигателите, за да се завърти в правилната посока.
Светлинните резистори са прикрепени към "тройниците" на местата, обозначени с числата 2 и 3. В тези позиции те могат да бъдат фиксирани с лепило с три пръчки.
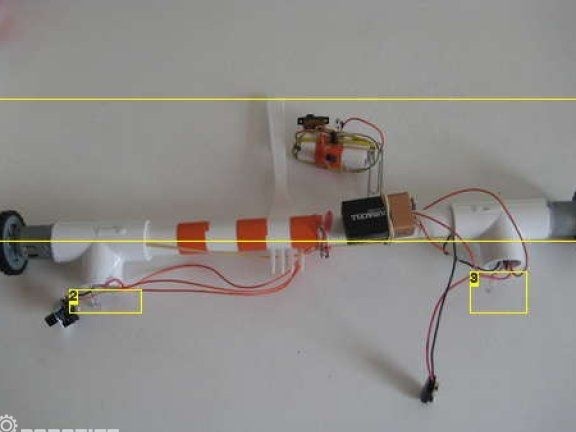
Стъпка трета Инсталиране на захранване
Общо роботът работи на два източника на енергия. Това са три АА батерии и една 9-волтова батерия. Що се отнася до батериите за пръсти, те са инсталирани вътре в тръбата.Е, към слушалката е прикрепена батерия тип „Krona“ отвън.
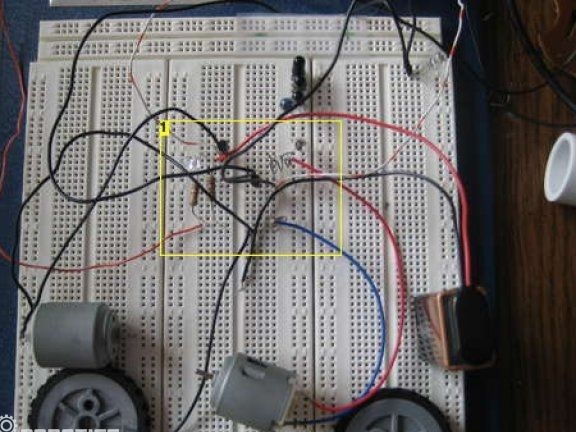
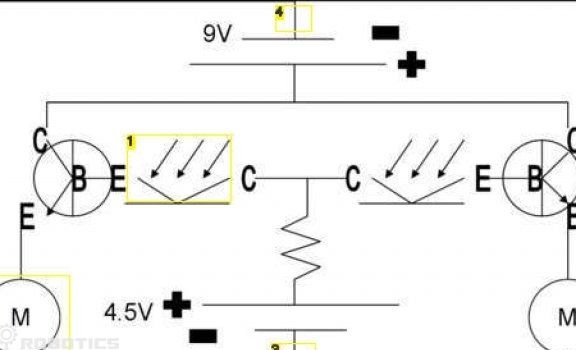
Стъпка четвърта Схема на робота
Схемата е проектирана по такъв начин, че ако роботът види радиация от едната страна, тогава той ускорява двигателя от противоположната страна, така че роботът се обръща. Желаната скорост на двигателя се постига чрез експериментална подмяна на резистори.
Друга схема може да бъде допълнена с превключвател. Той трябва да бъде инсталиран по такъв начин, че да прекъсне захранването на робота.
На диаграмата числото 1 обозначава фототранзистор, 2 - контролерът на двигателя, 3 - място за инсталиране на превключвател, 4 - можете също да поставите превключвател тук.
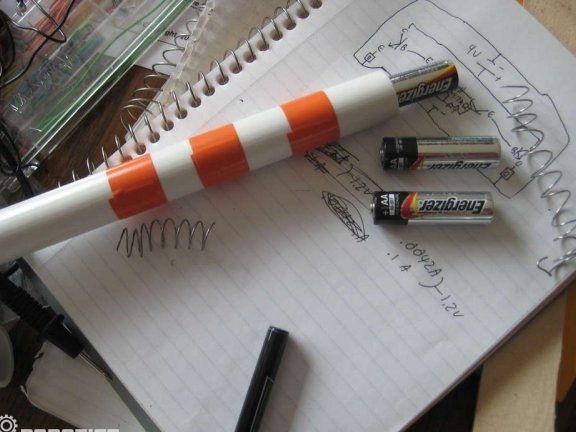
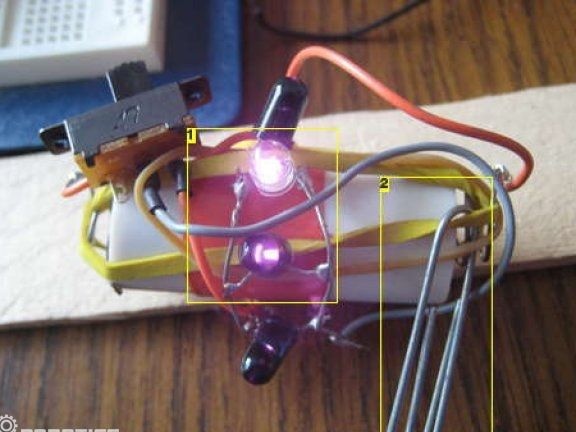
Стъпка пета Създайте IR маяк
За да създадете инфрачервен маяк, се взема къса поливинилхлоридна тръба, в която е монтирана една батерия АА. Контактите се поддържат благодарение на еластична лента, а захранването на четирите инфрачервени диода се управлява от превключвател. Не може да се види такава светлина с окото, за да се провери оперативността на диодите, които трябва да се гледат чрез цифрова камера. Маякът се закопчава с обикновена щипка за хартия към крака.
Стъпка шеста Последният етап от монтажа на робота
Сега всичко трябва да бъде свързано, както е посочено в диаграмата. Механичната част също трябва да бъде сглобена, най-много внимание трябва да се обърне на фоторезисторите, те трябва да стърчат, защото в противен случай няма да могат да вземат сигнала на маяка. Сега, като включите робота, трябва да го заобиколите и да видите какво ще направи.
Разбира се, роботът може да не отиде след собственика за първи път, но не бива да се отчайвате, защото веригата може да бъде модифицирана и роботът да бъде конфигуриран според нуждите. Според автора, в бъдеще на робота може да бъде инсталиран софтуер, благодарение на който той ще разпознава обекти и хора. Можете също така да инсталирате много различни сензори и да направите този робот високотехнологично устройство.